Первоисточник
Бертольд Гамбургер (Berthold Hamburger)
| Компьютероизированный 150 мм телескоп
Добсона Первоисточник |
|
|
Когда я строил мой телескоп три года назад, я уже планировал выполнить систему Мела Бартелса для автоматизации телескопа Добсона. Я закончил стороить электронику 2 года назад, но не мог найти время впоследствии чтобы делать необходимые модификации монтировки. Только теперь (апрель ' 99), после строительства моей обсерватории, я сумел выполнить привод. Я хочу использовать это место также, чтобы благодарить Мела за огромную работу, он сделал для нашего братства любителей телескопостроения, сопровождая эту великолепную систему приводов. Я также хочу благодарить его за его бесконечное терпение в помощи мне и другим в установке системы. Я надеюсь, что я смогу в будущем передавать полученные уроки другим . |
 |
Основание - это фанерный круг 20 мм толщины с диаметром 50 см. Он присоединен 4 винтами к бетонному столбу моей обсерватории. |
 |
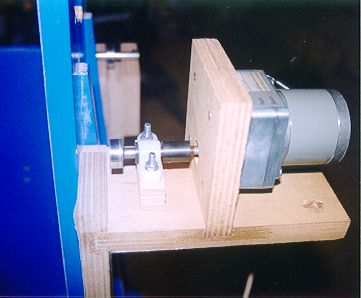
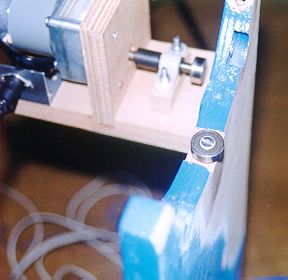
Червячный редуктор 1:250 RS-components и 6-х проводной шаговый двигатель Nema 23 4,1В /1,1A прикреплен непосредственно к основанию. |
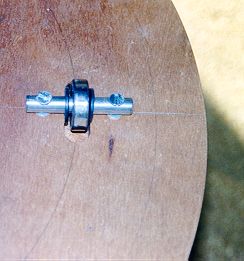 |
Два 32 мм шарикоподшипника, присоединены к основанию 10mm осью, и колеса привода составляют равносторонний треугольник. |
 |
Я первоначально использовал резиновое колесо привода для обоих азимутального и высотного приводов, но заменил их на стальные так как резиновые колеса вносят непредсказуемую PE [периодическую ошибку]. |
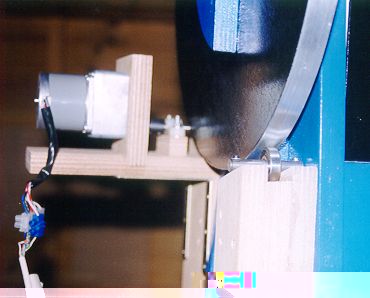 |
Для высотного привода Я заменил один оригинальный 20 см trunion на 40 см окантованый алюминием фанерный диск. |
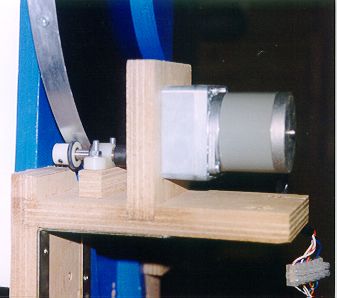 |
Мотор и редуктор присоединены к балансиру фанерным кронштейном. Я зажал тонкую ленту пены между кронштейном и монтировкой, чтобы избежать передачи вибрации. |
 |
Т.к. узел трубы относительно легок, я нуждаюсь к искусственно нагруженных высотном trunion и высотном ведущеем колесе. Для той цели я установил цепочку и пружинный натяжитель. Это простое устройство избегает проскальзывания между двумя ведущими колесами. |
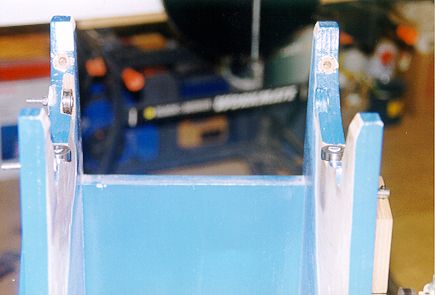 |
Следуя совету найденному на превосходной странице Chuck Shaw, я установил устройство, чтобы всегда сохранить трубу центрированной между сторонами балансира. |
 |
Оно состоит из дух небольших шарикоподшипников установленных в правом углу к высотной оси. |
 |
Для поддержки подшипников на балансире я высверлил вертикальные отверстия в балансире, укрепил подшипники на винтах и обернул тефлоновой лентой вокруг винта, чтобы достигнуть тугой посадки в отверстии. |
 |
Я использую старый 386SX лэптоп дополненный 387SX (подаренным Jim Burrows) математическим сопроцессором. Дисплей закрыт красным фильтром. Компьютер не имеет привода CD-ROM, но я установил частичную версию GUIDE на 40 МБ жесткий диск, как написано в GUIDE FAQ доступной на . |
 Для
подстройки микрошагов я приклеил
Для
подстройки микрошагов я приклеил  циферблат к обратной
стороне моторов. Что сделало это намного проще
для идентификации шагов которые слишком широкие
или слишком короткие. Похожий циферблат
обеспечивает также PEC [коррекцию периодической
ошибки] метку, чтобы
синхронизировать двигатели точно. Благодаря высокой потребляемая
мощности мох двигателей и низким вычислительным
возможностям моего лэптопа, я должен
использовать PWM значения ниже 38. Следовательно я
не, получил разрешающую способность микрошага
столь же прекрасной, как я хотел бы к, но
благодаря моему очень маленькому размеру
микрошага по обеим осям (~ 1,3 арксекунда /
микрошаг) трэкинг все еще очень гладкий. Так как я
использовал систему без батарей, я могу
предоставлять более высокую потребляемую
мощность, чем полевой пользователь. Для прогона и
трэкинга мои двигатели потребляют
приблизительно 0,2 А каждый
циферблат к обратной
стороне моторов. Что сделало это намного проще
для идентификации шагов которые слишком широкие
или слишком короткие. Похожий циферблат
обеспечивает также PEC [коррекцию периодической
ошибки] метку, чтобы
синхронизировать двигатели точно. Благодаря высокой потребляемая
мощности мох двигателей и низким вычислительным
возможностям моего лэптопа, я должен
использовать PWM значения ниже 38. Следовательно я
не, получил разрешающую способность микрошага
столь же прекрасной, как я хотел бы к, но
благодаря моему очень маленькому размеру
микрошага по обеим осям (~ 1,3 арксекунда /
микрошаг) трэкинг все еще очень гладкий. Так как я
использовал систему без батарей, я могу
предоставлять более высокую потребляемую
мощность, чем полевой пользователь. Для прогона и
трэкинга мои двигатели потребляют
приблизительно 0,2 А каждый
| Реклама: |
